|
 |
Gear hobbing, as any
cutting process based on the rolling principle, is a signally
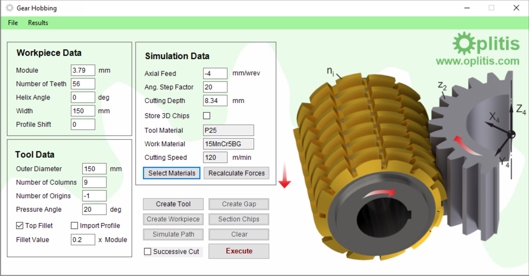
multiparametric and complicated gear fabrication method. The model
Oplitis is an effective and factual simulation of gear hobbing, based on
virtual kinematics of solid models representing the cutting tool and the
work gear. The selected approach, in contrast to former modeling
efforts, is primitively realistic, since the produced gear and chips
geometry are normal results of successive penetrations and material
removal of cutting teeth into a solid cutting piece. The algorithm has
been developed and embedded in a commercial CAD environment, by
exploiting its modeling and graphics capabilities. |
|
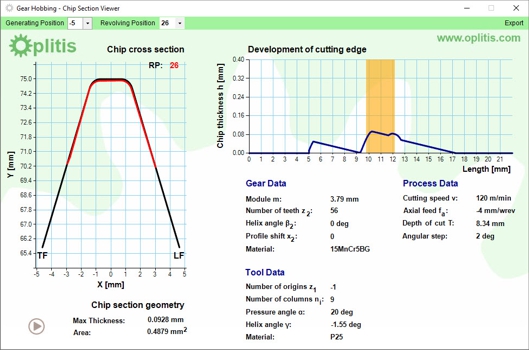
To generate the produced chip and gear
volumes, the hobbing kinematics is directly applied in one 3D gear gap.
The cutting surface of each generating position (successive cutting
teeth) formulates a 3D spatial surface, which bounds its penetrating
volume into the workpiece. This surface is produced combining the
relative rotations and displacements of the two engaged parts (hob and
work gear). Such 3D surface “paths” are used to split the subjected
volume, creating concurrently the chip and the remaining work gear solid
geometries. |
 |